
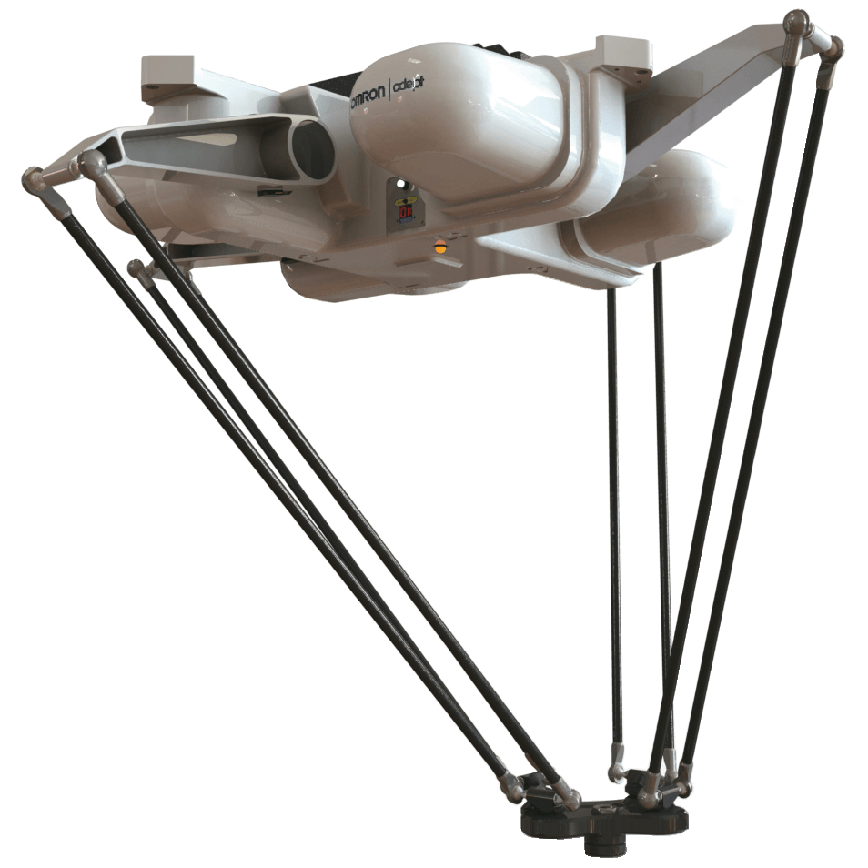
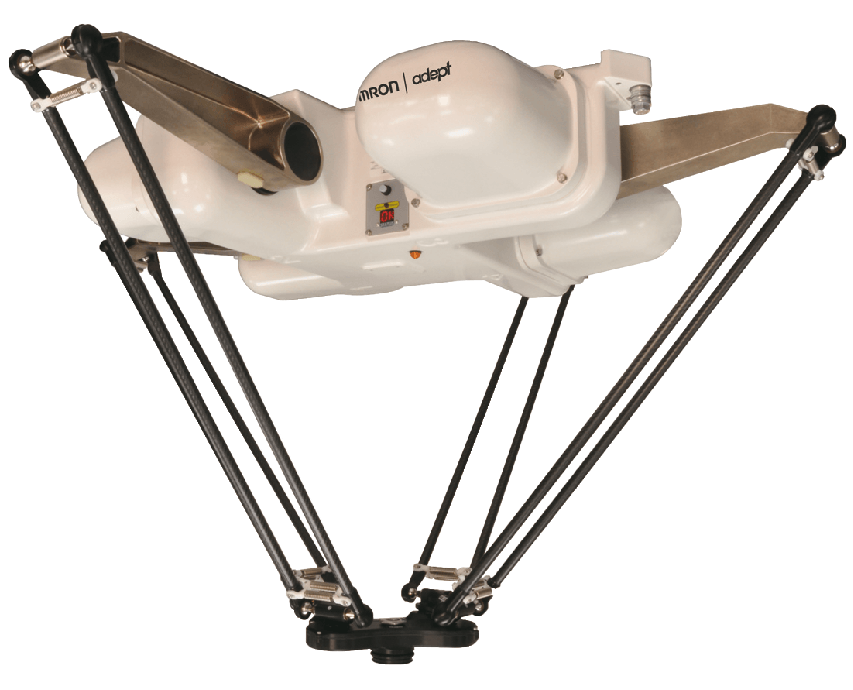
Quattro
4-Achsen Parallel-Roboter mit hoher Geschwindigkeit und hoher Präzision
- Ethernet-kompatibel zur Steuerung des Roboters über die gewohnte Programmiersprache (IEC 61131-3) des NX/NJ-Maschinen-Controllers
- Vier-Arm-Design verteilt Lasten gleichmäßig auf den Roboter.
- Schnelle und hochpräzise Fließbandverfolgung und Montage
- Hohe Nutzlast für Multi-Picking-Anwendungen
- Das 650HS-Modell hat die USDA-Zulassung für das Handling von primären Lebensmitteln
- Arbeitsbereich von 1.300 und 1.600 mm
- Bis zu 15 kg max. Nutzlast
- Schutzart: IP65 (IP66 für HS-Modell)
Spezifikationen & Bestellinfo
| Produkt | Payload | Reach | Robot controller | Z-Stroke | Degree of protection (IP) | Rotation -/+ | Platform type | Beschreibung | |
|---|---|---|---|---|---|---|---|---|---|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Delta Roboter - Quattro ePLC650H P30 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 3 (X/Y/Z) - Arbeitsbereich: ø 1300 x 500mm - Max. Arbeitsgewicht: 15Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Delta Roboter - Quattro ePLC650H P31 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 46.25° Rotationswinkel - Arbeitsbereich: ø 1300 x 500mm - Max. Arbeitsgewicht: 6Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Delta Roboter - Quattro ePLC650H P32 als Add-on zu vorhandenen Systemen - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 92.5° Rotationswinkel - Arbeitsbereich: ø 1300 x 500mm - Max. Arbeitsgewicht: 6Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Delta Roboter - Quattro ePLC650H P34 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 185° Rotationswinkel - Arbeitsbereich: ø 1300 x 500mm - Max. Arbeitsgewicht: 6Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg |
|
|
|
8 kg | 650 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Delta Roboter - Quattro ePLC650HS P30 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 3 (X/Y/Z) - Arbeitsbereich: ø 1300 x 500mm - Max. Arbeitsgewicht: 15Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - USDA - IP67 |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Delta Roboter - Quattro ePLC650HS P31 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 46.25° Rotationswinkel - Arbeitsbereich: ø 1300 x 500mm - Max. Arbeitsgewicht: 6Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - USDA - IP67 |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Delta Roboter - Quattro ePLC650HS P32 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 92.5° Rotationswinkel - Arbeitsbereich: ø 1300 x 500mm - Max. Arbeitsgewicht: 6Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - IP67 - USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Delta Roboter - Quattro ePLC650HS P34 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 185° Rotationswinkel - Arbeitsbereich: ø 1300 x 500mm - Max. Arbeitsgewicht: 6Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - USDA - IP67 |
|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP65 | 0 ° | P30 | Delta Roboter - Quattro 650H P30 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 3 (X/Y/Z) - Arbeitsbereich: ø 1300 x 500mm - Max. Arbeitsgewicht: 15Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - IP65 |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 46.25 ° | P31 | Delta Roboter - Quattro 650H P31 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 46.25° Rotationswinkel - Arbeitsbereich: ø 1300 x 500mm - Max. Arbeitsgewicht: 6Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - IP65 |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 92.5 ° | P32 | Delta Roboter - Quattro 650H P32 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 92.5° Rotationswinkel - Arbeitsbereich: ø 1300 x 500mm - Max. Arbeitsgewicht: 6Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - IP65 |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 185 ° | P34 | Delta Roboter - Quattro 650H P34 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 185° Rotationswinkel - Arbeitsbereich: ø 1300 x 500mm - Max. Arbeitsgewicht: 6Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - IP65 |
|
|
|
10 kg | 800 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Delta Roboter - Quattro ePLC800H P30 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 3 (X/Y/Z) - Arbeitsbereich: ø 1600 x 500mm - Max. Arbeitsgewicht: 10Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - IP67 |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Delta Roboter - Quattro ePLC800H P31 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 46.25° Rotationswinkel - Arbeitsbereich: ø 1600 x 500mm - Max. Arbeitsgewicht: 4Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - IP67 |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Delta Roboter - Quattro ePLC800H P32 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 92.5° Rotationswinkel - Arbeitsbereich: ø 1600 x 500mm - Max. Arbeitsgewicht: 4Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - IP67 |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Delta Roboter - Quattro ePLC800H P34 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 185° Rotationswinkel - Arbeitsbereich: ø 1600 x 500mm - Max. Arbeitsgewicht: 4Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - IP67 |
|
|
|
7 kg | 800 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Delta Roboter - Quattro 800HS P30 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 3 (X/Y/Z) - Arbeitsbereich: ø 1600 x 500mm - Max. Arbeitsgewicht: 10Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - USDA - IP67 |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Delta Roboter - Quattro ePLC800HS P31 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 46.25° Rotationswinkel - Arbeitsbereich: ø 1600 x 500mm - Max. Arbeitsgewicht: 4Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - USDA - IP67 |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Delta Roboter - Quattro ePLC800H P32 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 92.5° Rotationswinkel - Arbeitsbereich: ø 1600 x 500mm - Max. Arbeitsgewicht: 4Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - USDA - IP67 |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Delta Roboter - Quattro 800HS P34 als Add-on - inklusive XSYS Kabel (13323-000) - inklusive XSYS Kabel (11585-000) - inklusive DB9 Splitter (00411-000) - inklusive 1394 Latch Kabel (13632-045) - inklusive eV+ Lizenz (14529-103) - Freiheitsgrade: 4 (X/Y/Z/rot.) - 185° Rotationswinkel - Arbeitsbereich: ø 1600 x 500mm - Max. Arbeitsgewicht: 4Kg - Wiederholgenauigkeit X,Y,Z: ± 0.1mm - Gewicht: 117Kg - USDA - IP67 |
|
Zubehör
Ordering information
| Apperance | Type | Name/Specifications | Order code |
|---|---|---|---|
 |
Robot Integrated Controller | 16 motion axis, up to 8 robots control | NJ501-R300 |
| 32 motion axis, up to 8 robots control | NJ501-R400 | ||
| 64 motion axis, up to 8 robots control | NJ501-R500 | ||
 |
Robot Controller | SmartController EX | 19200-000 |
| SmartController EX + Front Panel | 19300-000 | ||
 |
Pendant | T20 Pendant with 10 m Cable | 10046-010 |
| T20 Pendant-Jumper Plug | 10048-000 | ||
| T20 Pendant Wall Bracket | 10079-000 | ||
| T20 Adapter Cable, 3 m | 10051-003 | ||
 |
Vision Controller | IPC Application Controller | AC1-152000 |
 |
Camera | GigE PoE, 1602 x 1202 pixels, 60 fps, Monochrome, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-250 |
| GigE PoE, 1602 x 1202 pixels, 60 fps, Color, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-251 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Monochrome, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-300 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Color, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-301 | ||
| Belt Encoder (Conveyor-Tracking) |
Encoder Kit IP65 | 09742-001 | |
| Y-Adapter Cable, 3 m | 09443-000 | ||
| Encoder Extension Cable, 5 m | 09446-050 | ||
| SCEX-BELT,Y-Adapter Cable, 0.5 m | 09550-000 | ||
| XBELTIO Cable, 0.6 m | 13463-000 | ||
| Additional I/O Options | IO Blox (connect to robot), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30200 | |
| IO Block (connect to previous IO Blox), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30100 | ||
| IO Blox-to-robot Cable, 3 m | 04677-030 | ||
| IO Blox-to-IO Blox Cable, 3 m | 04679-030 | ||
| IO Blox-to-IO Blox Cable, 0.3 m | 04679-003 | ||
| XIO Termination Block, 12 inputs/8 outputs, cables included (1.8 m) | 90356-40100 | ||
| XDIO Termination Block, 50 pin, cables included (2 m) | 09747-000 | ||
 |
Front Panel | Front Panel with 3 m cable | 90356-10358 |
| Front Panel Cable, 3 m | 10356-10500 | ||
| Power Supply/Cable | AC Power Cable, 5 m | 04118-000 | |
| 24 VDC Power Cable, 5 m | 04120-000 | ||
| 24 VDC, 6.5 A, 150 W (Front Mounting), Power Supply | S8FS-G15024C
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 24 VDC, 6.5 A, 150 W (DIN-Rail Mounting), Power Supply | S8FS-G15024CD
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 1394 Cable, 4.5 m | 13632-045 | ||
| eAIB XSYSTEM Cable Assembly, 1.8 m | 13323-000 | ||
| DB9 Splitter, 0.3 m | 00411-000 | ||
| eAIB XSYS Cable, 4.5 m | 11585-000 | ||
| Ethernet Cable | XS6W-6LSZH8SS
2
Refer
to the Industrial Ethernet Cables Catalog (Cat.No.G019) for details. |
||
| Industrial Switching Hubs | W4S1-05C
2
Refer
to the Industrial Switching Hubs Catalog (Cat.No.V227) for details. |
||
| Solenoid Valve Kit | eCobra robots (600, 800, 800 Inverted) | 02853-000 | |
| Cable Seal Kit | Hornet 565 IP65/67, Quattro 650HS IP65/67, Quattro 800HS IP65/67 | 08765-000 | |
| Quattro 650HS Standard, Quattro 800HS Standard | 09564-000 | ||
| eCobra 800 IP65/67 | 04813-000 | ||
| eCobra 800 Inverted IP65 | 09073-000 | ||
 |
ACE License | Automation Control Environment (for ACE 4.x) | Please download it from following URL: http://www.adept.com/Robots-Tool |
| ACE PackXpert (for ACE 4.x) | 20409-000 | ||
| ACE Sight Vision Software (for ACE 4.x) | 20410-000 | ||
| ACE PackXpert with ACE Sight Vision (for ACE 4.x) This license contains an ACE PackXpert license and an ACE Sight license. |
20433-000 | ||
 |
Related Products | Machine Automation Controller NX/NY/NJ Series | NX/NY/NJ
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
| Automation Software Sysmac Studio | SYSMAC-SE2
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
||
| Collection of software functional componentsSysmac LibraryAdept Robot Control Library | SYSMAC-XR009
2
Refer
to the Sysmac Library Catalog (Cat.No.P106) for details. |
||
| Sysmac Studio 3D Simulation option | SYSMAC-SA4 |
||
Contact your Omron representative for lenses, lights, and licenses.
Sysmac Library
![]()
The Sysmac Library is a collection of software functional components that can be used in programs
for the NX/NY/NJ Machine Automation Controllers.Please download it from following URL and install to Sysmac Studio Automation Software.http://www.ia.omron.com/sysmac_library/The Adept Robot Control Library allows you to control Delta, Articulated and SCARA robots manufactured
by Omron Adept Technologies Inc. from the NX/NY/NJ Machine Automation Controller by using the same
instructions and programming methods.
Sie brauchen Unterstützung?
Wir helfen Ihnen gerne! Sprechen Sie uns an, und unsere Experten helfen Ihnen, die beste Lösung für Ihr Unternehmen zu finden.
Ihr Kontakt Quattro

Vielen Dank für Ihre Anfrage. Wir setzen uns umgehend mit Ihnen in Verbindung.
Es liegen zur Zeit technische Probleme vor. Ihre Übertragung war nicht erfolgreich. Entschuldigen Sie dies bitte und versuchen es später noch einmal. Details
Angebot für Quattro
Über dieses Formular erhalten Sie ein Angebot zu Ihrem ausgewählten Produkt. Bitte füllen Sie alle Felder aus, die diese * Markierung besitzen. Ihre persönlichen Daten werden natürlich vertraulich behandelt.
Vielen Dank für Ihre Angebots-Anfrage, die wir schnellstmöglich beantworten werden.
Es liegen zur Zeit technische Probleme vor. Ihre Übertragung war nicht erfolgreich. Entschuldigen Sie dies bitte und versuchen es später noch einmal. Details
Delta-Roboter-Serie
Quattro 800H
- Arbeitsbereich: ø 1.600 x 215 mm (max. 500 mm)
- Max. Nutzlastbereiche: 4 bis 10 kg
- Achsenzahl: 4
- IP65 (mit optionalem Kabelversiegelungs-Kit)
Quattro 650H/HS
- Arbeitsbereich: ø 1.300 x 215 mm (max. 500 mm)
- Max. Nutzlastbereiche: 3 bis 15 kg
- Achsenzahl: 4
- IP65 (mit optionalem Kabelversiegelungs-Kit), IP66-HS-Ausführung
- Quattro 650HS hat die USDA-Zulassung für das Handling von primären Lebensmitteln
Steuerungseinheiten
Videos

-

Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.
01:21
Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.Zugehörige Produkte
-

Parallel-Roboter, ideal geeignet für den Einsatz in der Lebensmittel-, Getränke-, Pharma- und Gesundheitsbranche
-

Parallelroboter, ideal für den Einsatz in der Lebensmittel-, Getränke- und Pharmaindustrie sowie im Gesundheitswesen
-

Vierachsen-Parallelroboter mit hoher Geschwindigkeit und hoher Präzision
Downloads









_users_manual_en.jpg)








_getting_started_guide_en.jpg)






