
Integrierter Controller für die Robotik
Für Anwendungen, die eine Hochgeschwindigkeitsverarbeitung für die Maschinensteuerung, Sicherheit, Zuverlässigkeit und Wartungsfreundlichkeit erfordern.
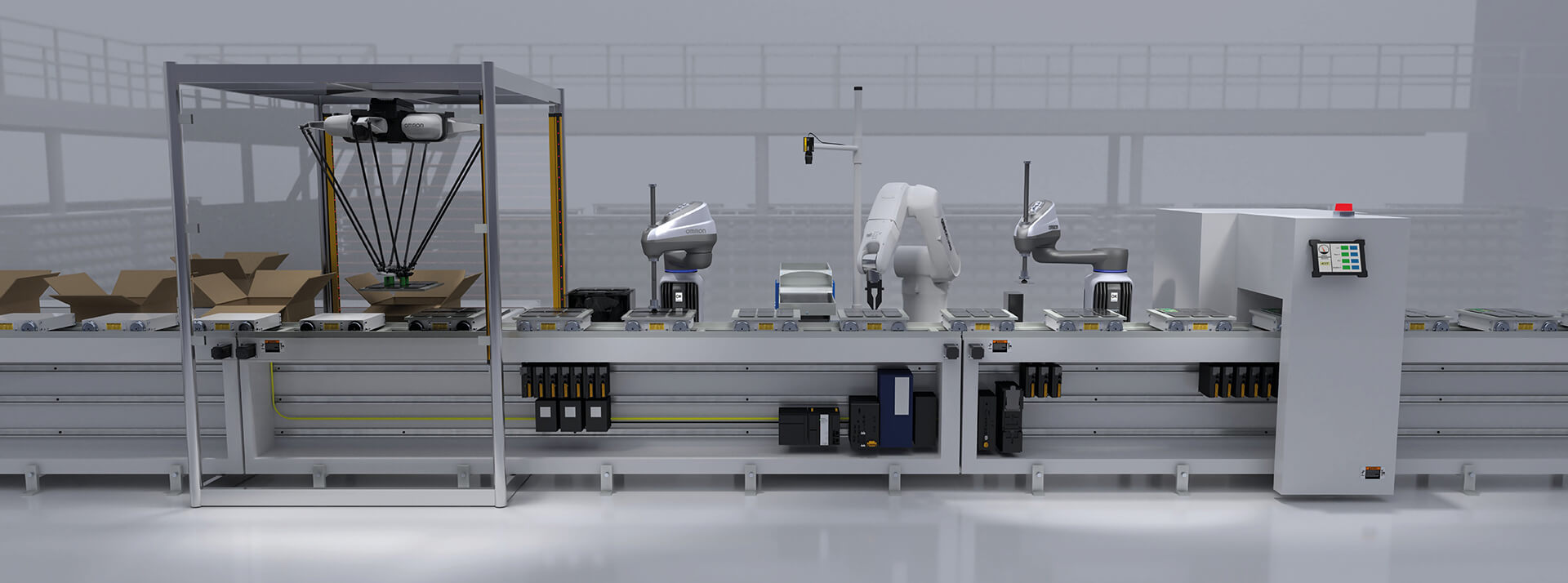
Unser integrierter Controller für die Robotik synchronisiert die Automatisierungstechnik perfekt, sodass Kunden die Geschwindigkeit und Genauigkeit ihrer Produktion verbessern, die gesamte Produktionslinie simulieren, die Wartung vereinfachen und die Markteinführung beschleunigen können.
- Bis zu 8 Robotersteuerungen pro CPU
- Integration von Robotik, Logik und Bewegung in einer CPU
- Entspricht der Norm IEC 61131-3 (JIS B 3503) für Programmierung und PLCopen Funktionsblöcke für Motion-Control
- Entspricht der Norm IEC 61131-3 (JIS B 3503) für Programmierung und herkömmliches V+-Skripting für Roboter und Motion-Control
- Durch Programmierung mit Variablen können Benutzer komplexe Programme effizient erstellen
- Modelle mit SQL-DB-Funktionalität
- Bietet Geschwindigkeit ohne Kompromisse bei der Zuverlässigkeit und Robustheit, wie sie von SPSen erwartet wird.
- Lineare und zirkulare Interpolation.
- Elektronische Synchronisation von Getriebe und Kurvenscheiben.
- Schnelle und präzise Steuerung durch Synchronisierung aller EtherCAT-Geräte wie Bildverarbeitung, Antriebe, Roboter und E/A mit dem Controller.
- Für Geschwindigkeit ohne Kompromisse in Sachen Zuverlässigkeit.
Spezifikationen & Bestellinfo
| Produkt | Supports DB connection | Max. number of robots | Max. number of synchronous axes | Primary task cycle time | Program memory | Variables memory | Communication port(s) | Max. number of remote I/O nodes | Supports sequence control | Supports motion control | Supports robotics control | Beschreibung | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
No | 8 | 16 | 0.5 ms | 20 MB | 6 MB | EtherCAT Master, EtherNet/IP, USB | 192 | Yes | Yes | Yes | Integrated Robot Controller NJ5: 8 Roboter und 16 Servoachsen |
|
|
|
Yes | 8 | 16 | 0.5 ms | 20 MB | 6 MB | EtherCAT Master, EtherNet/IP, USB | 192 | Yes | Yes | Yes | Robotic Integrated Controller NJ5: 8 robots and 16 servo axes, SQL client |
|
|
|
No | 8 | 32 | 0.5 ms | 20 MB | 6 MB | EtherCAT Master, EtherNet/IP, USB | 192 | Yes | Yes | Yes | Integrated Robot Controller NJ5: 8 Roboter und 32 Servoachsen |
|
|
|
Yes | 8 | 32 | 0.5 ms | 20 MB | 6 MB | EtherCAT Master, EtherNet/IP, USB | 192 | Yes | Yes | Yes | Robotic Integrated Controller NJ5: 8 robots and 32 servo axes, SQL client |
|
|
|
No | 8 | 64 | 0.5 ms | 20 MB | 6 MB | EtherCAT Master, EtherNet/IP, USB | 192 | Yes | Yes | Yes | Integrated Robot Controller NJ5: 8 Roboter und 64 Servoachsen |
|
|
|
Yes | 8 | 64 | 0.5 ms | 20 MB | 6 MB | EtherCAT Master, EtherNet/IP, USB | 192 | Yes | Yes | Yes | Robotic Integrated Controller NJ5: 8 robots and 64 servo axes, SQL client |
|
Sie brauchen Unterstützung?
Wir helfen Ihnen gerne! Sprechen Sie uns an, und unsere Experten helfen Ihnen, die beste Lösung für Ihr Unternehmen zu finden.
Ihr Kontakt Integrierter Controller für die Robotik

Vielen Dank für Ihre Anfrage. Wir setzen uns umgehend mit Ihnen in Verbindung.
Es liegen zur Zeit technische Probleme vor. Ihre Übertragung war nicht erfolgreich. Entschuldigen Sie dies bitte und versuchen es später noch einmal. Details
Angebot für Integrierter Controller für die Robotik
Über dieses Formular erhalten Sie ein Angebot zu Ihrem ausgewählten Produkt. Bitte füllen Sie alle Felder aus, die diese * Markierung besitzen. Ihre persönlichen Daten werden natürlich vertraulich behandelt.
Vielen Dank für Ihre Angebots-Anfrage, die wir schnellstmöglich beantworten werden.
Es liegen zur Zeit technische Probleme vor. Ihre Übertragung war nicht erfolgreich. Entschuldigen Sie dies bitte und versuchen es später noch einmal. Details
Funktionen
Die neue Robotics Integrated Platform ist die Weiterentwicklung innerhalb des SYSMAC-Ökosystems, die die gesamte Produktlinie der ORT Fixed Robotics nahtlos integriert.
Vollständige Integration (Steuerung): Vereinheitlichte Steuerungsautomatisierung + Robotik
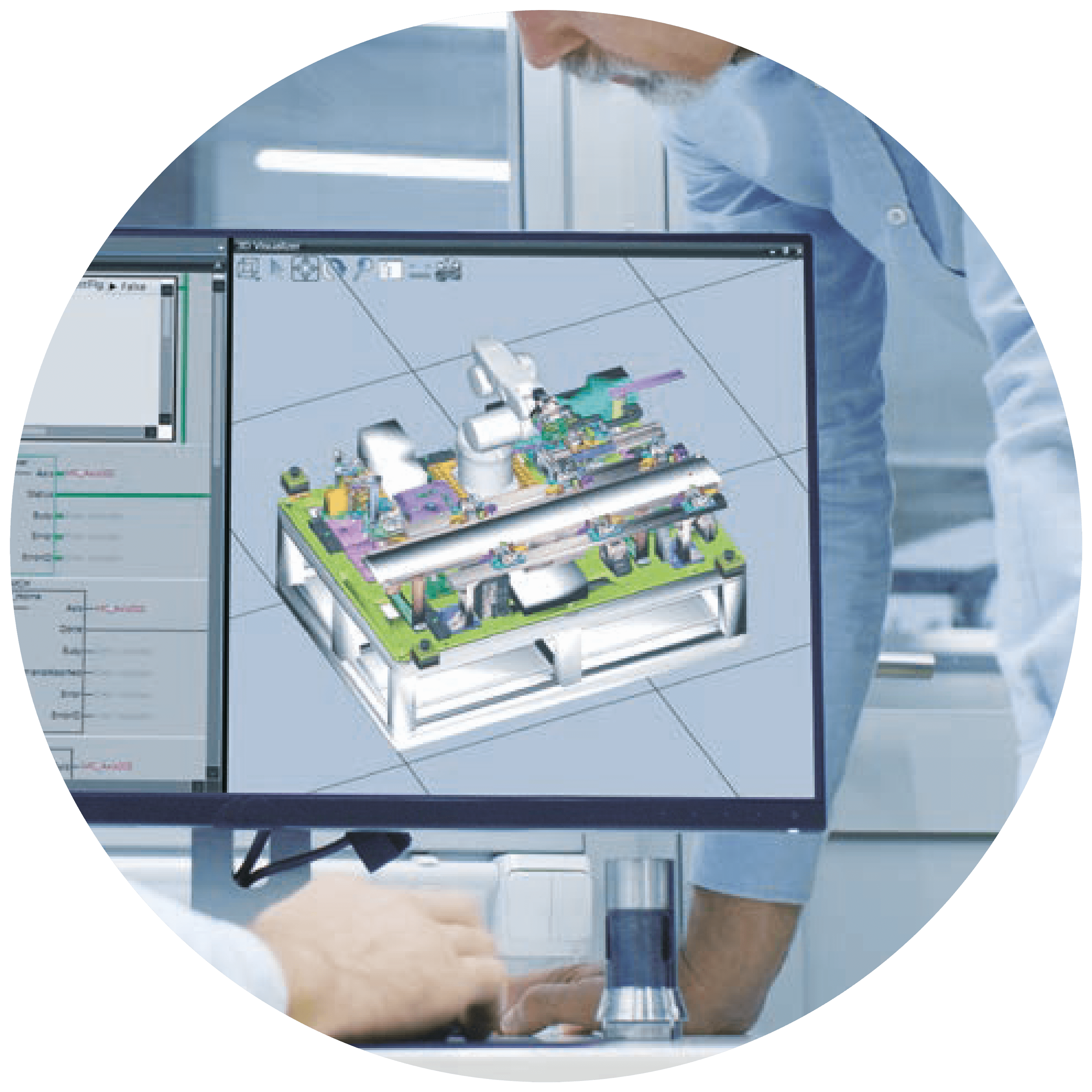
Prozessintegration (Produkteinführungszeit): Anwendungen können vom Entwurf bis zur Inbetriebnahme, zum Betrieb und zur kontinuierlichen Verbesserung entwickelt werden.
Integration der Lieferkette (Flexibilität): Benutzer können die Produktion leicht umprogrammieren (SPS und Roboter), modifizieren oder skalieren, was eine flexible Anpassung an schwankende Nachfragen ermöglicht. Die Maschinensteuerung NJ-R mit neuer Robot Integrated CPU unterstützt bis zu 8 Roboter sowie eine unabhängige Steuerung der Bewegungsachse.
6 CPUs:
- NJ501-R300: 8 Roboter + 16 Bewegungsachsen
- NJ501-R400: 8 Roboter + 32 Bewegungsachsen
- NJ501-R500: 8 Roboter + 64 Bewegungsachsen
- NJ501-R320: 8 Roboter + 16 Bewegungsachsen + SQL-Funktionalität
- NJ501-R420: 8 Roboter + 32 Bewegungsachsen + SQL-Funktionalität
- NJ501-R520: 8 Roboter + 64 Bewegungsachsen + SQL-Funktionalität
Vorteile für Kunden
- Schnellere Bewertung (Systemintegrator & OEM)
- Frühzeitige Renditeberechnung und Entwicklungsvalidierung dank Simulationssoftware
- Verbesserungen durch Umstellung auf zukünftige Produkte können durch Simulation validiert werden.
- Investitionskosten lassen sich im Voraus berechnen.
- Schätzung der Zykluszeit
- Verbesserung von Konzeption und Planung

Kürzere Inbetriebnahmedauer (Systemintegrator & OEM)
- Reduzieren Sie die Integrationsdauer durch Offline-Programmierung.
- Xpert-Module reduzieren die Integrationsdauer und Lernkurve.
- Verringern Sie den mechanischen und elektrischen Konstruktionsaufwand durch die Emulation voller Zellen über die Sysmac-Plattform.
Geringere Betriebskosten
- Die Echtzeitsynchronisation zwischen Roboter und SPS (Bewegungssteuerung und übrige ECAT-Geräte) verbessert die Produktivität.
- Der Recipe Manager vereinfacht Modifikationen und minimiert den Produktwechsel im Laufe der Zeit.
Technologie
Alles über ein Steuergerät: Nahtlose Integration von Sequenz-, Bewegungs- und Robotersteuerung
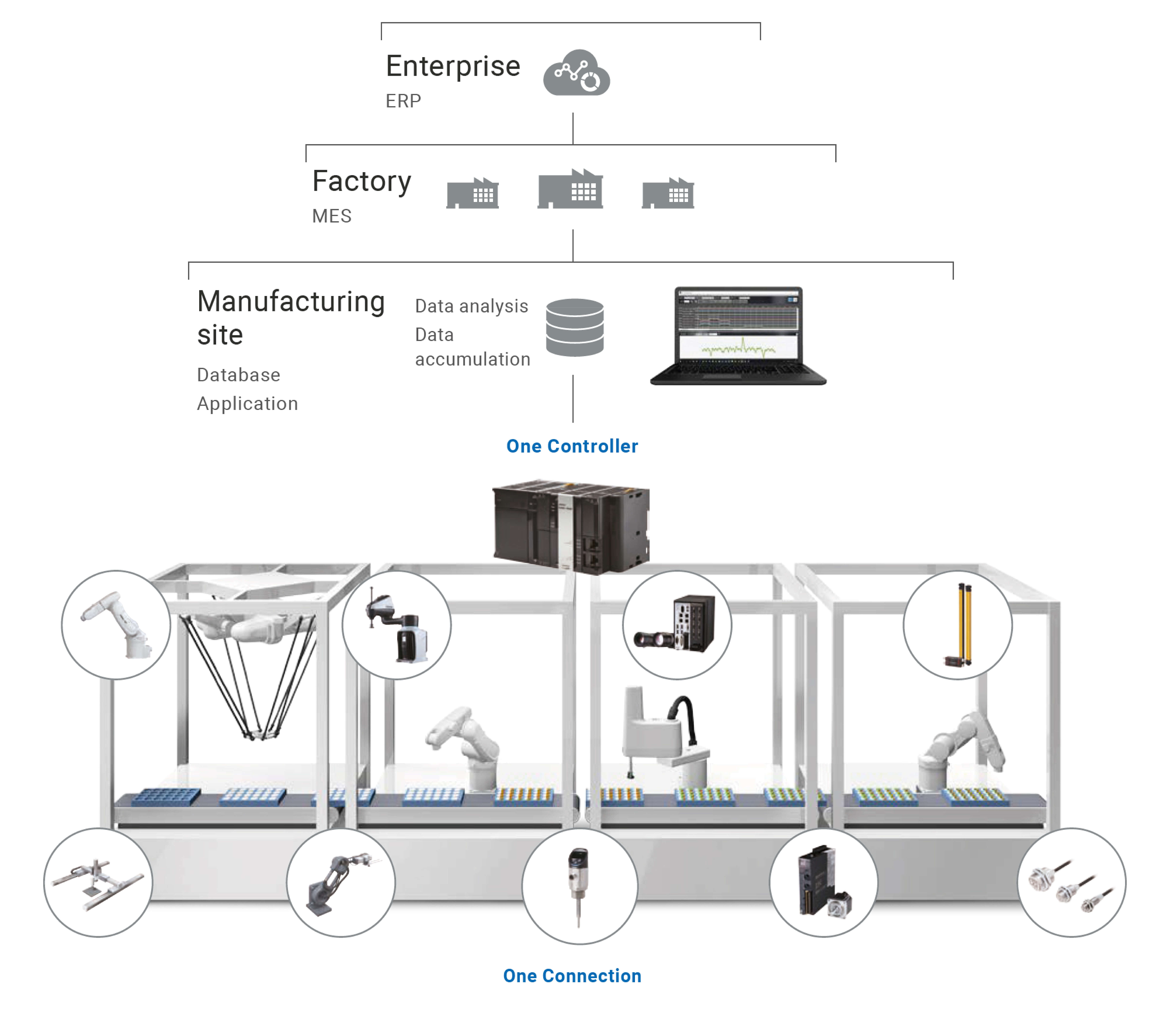
Beim Ansatz, für alles nur ein Steuergerät zu verwenden, werden Roboter-, Sequenz- und Bewegungssteuerung in einer Steuerung integriert. Dies ermöglicht die synchronisierte Steuerung von Robotern und anderen Geräten. Zudem können Benutzer Informationen auf Geräten erfassen, die sich an einer gemeinsamen Zeitleiste orientieren und daraus einen praktischen Nutzen erzielen.
Integration aus dem
- Betrieb – ERP
- Werk – MES
- Fertigungsstandort – Datenbankanwendung und -analyse
- Produktionslinie durch Integration verschiedener Produkte
Zugehörige Produkte
-

Steigern Sie Ihre Produktivität
-

Gelenkarm-Roboter für Bearbeitung, Montage und Materialhandhabung
-

SCARA-Roboter für präzise Bearbeitung, Montage und Materialhandhabung
-

Höhere Produktivität dank höherer Nutzlast und schnellerer Zykluszeit
-

Parallelroboter, ideal für den Einsatz in der Lebensmittel-, Getränke- und Pharmaindustrie sowie im Gesundheitswesen
-

Vierachsen-Parallelroboter mit hoher Geschwindigkeit und hoher Präzision
Downloads



Bitte anmelden oder registrieren um dieser Seite Inhalten
_cg_en.jpg)
Bitte anmelden oder registrieren um dieser Seite Inhalten





Bitte anmelden oder registrieren um dieser Seite Inhalten

_cg_en.jpg)

_cg_en.jpg)
_cg_en.jpg)

_cg_en.jpg)







Bitte anmelden oder registrieren um dieser Seite Inhalten
Bitte anmelden oder registrieren um dieser Seite Inhalten
Bitte anmelden oder registrieren um dieser Seite Inhalten

Bitte anmelden oder registrieren um dieser Seite Inhalten

Bitte anmelden oder registrieren um dieser Seite Inhalten
Bitte anmelden oder registrieren um dieser Seite Inhalten
_cg_en.jpg)
Bitte anmelden oder registrieren um dieser Seite Inhalten

Bitte anmelden oder registrieren um dieser Seite Inhalten

Bitte anmelden oder registrieren um dieser Seite Inhalten




